


 Steve Neemeh
Steve Neemeh
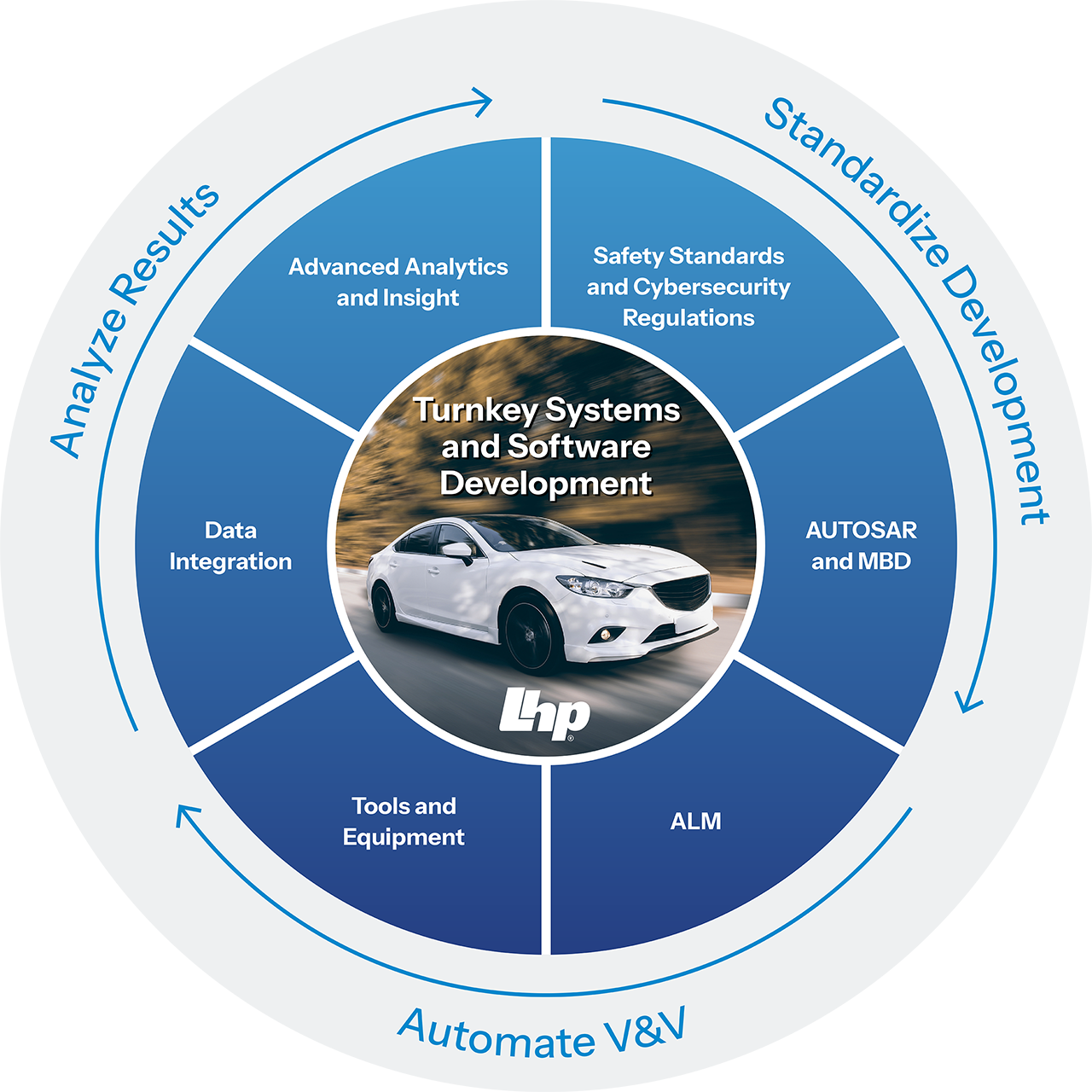
Automotive Functional Safety and Cybersecurity Platform
LHP will be at the 2018 IoT Solutions World Congress Showcasing Embedded Cybersecurity On a Vehicle Platform

Autonomous driving has been a technological pursuit for years, with many major companies racing to develop safe, reliable self-driving vehicles. Despite the remarkable progress, the dream of a fully autonomous future still faces significant hurdles—particularly ensuring comprehensive, safe situational awareness for vehicles in dynamic, real-world environments. Most solutions today rely on expensive onboard systems such as lidar, radar, and cameras, all of which require considerable computational power. Safety and security are still the barriers keeping autonomous driving from becoming a reality. Vehicle manufacturers are attempting to prove safety either through real-world test data or through compliance with safety standards such as ISO 26262, SOTIF, and others. All these means have practical limitations. Real-world data only proves static safety, meaning the safety of the system under current configurations. The problem is that the vehicles are constantly being upgraded, and AI is learning, making that data invalid as fast as you can gather it. Compliance with standards, although possible, is also impractical in some cases because of the sheer number of lines of code and the dynamic nature of AI. The ultimate solution to this problem is a layered system of systems that includes not only the vehicle but the infrastructure.
An innovative, cost-effective solution is possible. Use the existing infrastructure to provide some of the computing power needed to make vehicles less dependent on their system of sensors. That concept was developed and patented by LHP and was aptly named: Streetlamp Situational Awareness Systems (SSAS). By utilizing a network of smart streetlamps equipped with advanced cameras, sensors, and artificial intelligence (AI), SSAS can significantly enhance the safety of autonomous vehicles (AVs) while reducing the computational burden on the vehicles themselves. This technology offers a supplement to existing onboard systems and can help autonomous vehicles safely navigate a variety of challenging environments, from school zones to construction sites.
The fundamental innovation behind SSAS lies in its use of existing infrastructure—specifically, streetlamps—to create a networked situational awareness system. These smart streetlamps are equipped with high-resolution cameras, AI-powered object recognition software, and real-time communication technology to monitor streets and traffic conditions 24/7. By doing so, SSAS provides a layer of "situational safety intelligence" that autonomous vehicles can tap into for better decision-making.
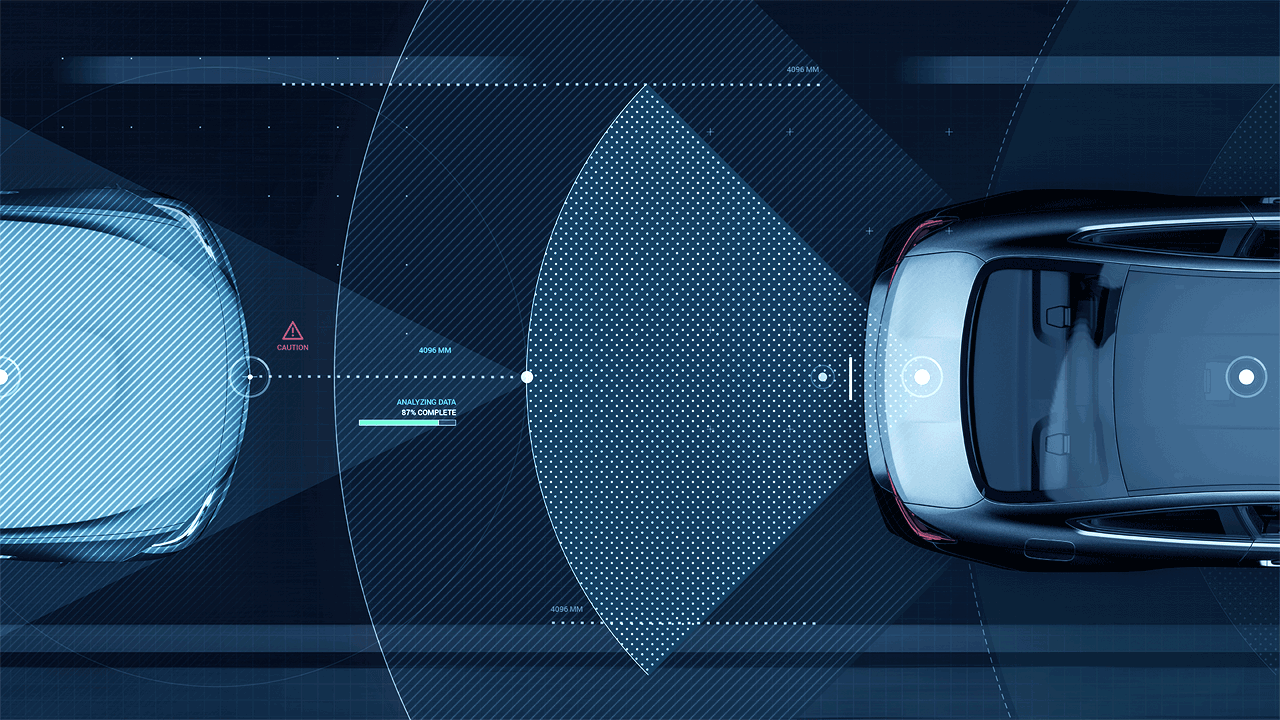
Unlike autonomous vehicles that rely solely on onboard sensors to detect and respond to their surroundings, SSAS extends the vehicle’s awareness beyond its immediate range to the surrounding environment. The cameras mounted on streetlamps offer a bird's-eye view of intersections, roadways, and sidewalks, which can detect objects or hazards outside the line of sight of an AV’s sensors. These streetlamp systems can also use infrared or thermal imaging to detect objects in low-visibility conditions, such as fog, darkness, or rain.
The data captured by each streetlamp is fed into a central processing system, where AI algorithms analyze it and share real-time updates with vehicles in the area. This networking effect helps eliminate blind spots and dramatically improves the overall safety of AVs on the road. In essence, the streetlamps serve as an extension of the vehicle’s sensory system, offering wider coverage and better detection capabilities.
One of the key advantages of SSAS is its ability to offload some of the heavy computational demands from autonomous vehicles. AVs rely on an array of onboard sensors, such as lidar, radar, and cameras—to detect objects, map their surroundings, and make decisions in real-time. Processing all this data requires significant computing power, which not only adds cost and complexity to the vehicle but also increases power consumption, especially in dense or complex environments. Those sensors also have limited awareness. They can’t see what’s ahead, nor are they tapped into construction zone real-time changes.
Current-generation AVs are equipped with advanced computers capable of handling terabytes of sensor data every hour. This data includes 3D mapping from lidar, object detection from cameras, and proximity sensing from radar. All this information must be processed in milliseconds to allow the vehicle to make real-time decisions, such as adjusting speed, changing lanes, or stopping to avoid obstacles.
The problem arises when the vehicle must handle large amounts of data, especially in high-traffic, complex environments like city centers or construction zones. Processing this data consumes significant computational resources, increasing the demand for powerful (and expensive) hardware for situations that aren’t common but are necessary for coverage and safety.
This is where SSAS offers a transformative advantage. By using cameras and sensors mounted on streetlamps to monitor and analyze road conditions, much of the heavy computational work can be handled externally, specifically for the “coffin corners of safety.” Putting an autonomous vehicle in a city is far more difficult than putting it on a freeway. 90% safety is not enough when lives are at stake. To be viable to fly an aircraft, you need a system's failure probability is one in a billion (or 0.000000001). There is no way an autonomous vehicle can prove that probability, but a system of systems, including the vehicle and the SSAS, might!
SSAS processes data related to object detection, classification, and tracking in its centralized system. It then shares the key information, such as the presence of pedestrians, construction zones, or stopped vehicles with nearby autonomous vehicles.
Instead of every vehicle constantly running complex algorithms to process its environment safely, it can rely on real-time updates from the SSAS network in combination with its perception. This offloads a significant amount of the computational burden, allowing the AV’s onboard system to focus on more critical tasks, such as trajectory planning, vehicle control, and decision-making based on the processed data provided by SSAS. It provides a better overall solution to a problem that can’t be solved by auto manufacturers alone.
By shifting a portion of the computing load from the vehicle to the SSAS infrastructure, several benefits are realized:

Functional safety and cybersecurity are critical pillars in the development of autonomous vehicles (AVs). As these vehicles operate without direct human intervention, ensuring the reliability of their systems is paramount to prevent accidents and mitigate hazards. Functional safety ensures that the vehicle's systems can detect, manage, and respond to internal failures, safeguarding both passengers and pedestrians. Meanwhile, cybersecurity is essential to protect the vehicle's connected systems from malicious attacks, ensuring the integrity of communication and control. A breach could lead to catastrophic consequences, including vehicle manipulation or data theft. Together, functional safety and cybersecurity create a robust framework that enables AVs to operate safely and securely in a complex, connected environment.
LHP is dedicated to advancing the future of autonomous vehicles by prioritizing both functional safety and cybersecurity. Our mission is to ensure that AVs operate reliably and securely, minimizing risks and vulnerabilities in critical systems. By embedding rigorous safety protocols and robust cybersecurity measures into every stage of development, LHP is helping to build a safer, smarter transportation ecosystem. We are committed to enabling the full potential of autonomous vehicles, providing solutions such as the SSAS that uphold the highest standards of safety and security in an increasingly connected world.

LHP will be at the 2018 IoT Solutions World Congress Showcasing Embedded Cybersecurity On a Vehicle Platform

Powered by: LHP Engineering Solutions, AASA Incorporated, National Instruments, and PTC LHP Engineering Solutions, an engineering services provider...

Self-driving vehicles are coming. There’s a certain sense of inevitability. Mentions appear almost daily in the news with players such as Tesla,...
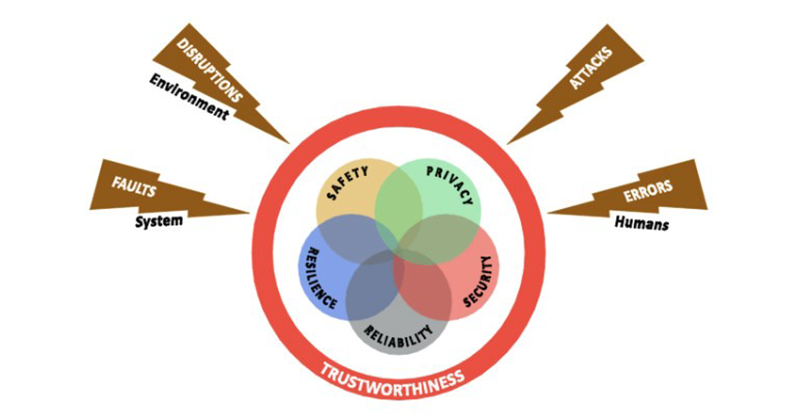
When contending with the complicated and interconnected devices of the Industrial Internet of Things (IIoT), the question of trustworthiness is...
In the ever-evolving landscape of automotive technology, researchers and engineers are at the forefront of developing and refining the most...